
Rapid Control Prototyping
Smart, easy-to-use and low cost rapid control prototyping through EicasLab professional RCP
To test and validate the overall real-time software code, before transferring it in the final target, EicasLab offers a powerful Rapid Control Prototyping module, based on a Real-time Scheduler and Multi-threading programming techniques, that - starting from the control system architectures designed in EicasLab – is able to generate a special real-time software code to be transferred on a PC with a Linux Real-time Operating System directly connectable to the plant to be controlled (EicasLab RCP Platform).
Rapid Control Prototyping Highlights
- All the control design phases in only one PC equipped with Linux RTOS and EicasLab suite
- Rapid Control Prototyping in three steps: RCP on field, Slow Motion and SIM RCP
- Powerful multi-threading and multi-core programming techniques
- Easy configuration of HW interfaces and control activities real-time scheduling
- Control system testing on the real plant and emulation of final HW architecture with only one PC
THE INNOVATIVE RAPID CONTROL PROTOTYPING APPROACH IN EicasLab
Rapid Control Prototyping or RCP is a process which lets the engineer quickly test and iterate the control strategies on a dedicated hardware equipped with a real-time operating system and with real input/output devices: the plant under control is real and the control strategy is executed in real-time in a hardware that can be commanded through a host computer where data recording capabilities for tuning and debugging purposes are required.
Nowadays the RCP activity foresees the use of different development environments and hardware boxes in order to perform the RCP process. This method forces the developers to export and to import continuously and iteratively software modules among the different environments with the risk to introduce bugs at each import/export of the source code. These conversions are often uncomfortable and the RCP process performance (cost, effort, effectiveness, etc.) can be improved by gathering all the phases into a unique development environment (HW/SW) as proposed by the innovative Rapid Control Prototyping approach introduced in EicasLab.
The innovative EicasLab approach is based on the idea of gathering together, all in one suite, all the control design phases (from the Modelling and Like Real-Time simulation until the Rapid Control Prototyping and concluding with the automatic generation of software for the Target) in order to avoid:
- exporting/porting the control code among different software tools that can generate bugs in the exported code;
- using several hardware components for different activities.
On the same PC equipped with only ONE software suite the control engineer can develop and simulate the whole system and then directly make RCP trials by piloting the real plant. He can address all the control design phases by means of a single platform suitable for all phases. In Rapid Control Prototyping operative mode, EicasLab provides the following three operative sub-modes, each one managed by a specific EicasLab tool.
- RCP on field that manages the overall experimental trial executions. For performing this step the RCP module provides the RCP Manager tool;
- Slow Motion that carries out the Slow Motion key feature by allowing, by means of the Slow Motion tool, the offline repetition of experimental trials executed on field for advanced debugging and tuning purposes. The Slow Motion tool is available in the RCP module;
- SIM RCP that allows a very easy switching from real-time to the simulation environment in order to perform further analysis with the same control algorithms and configuration experimented on field. For performing this step the RCP module provides the SIM RCP tool that works in a similar way than the SIM tool.
The generated Basic Software (BS) implements a Real-Time Scheduler able to manage the processor clock and the I/O interrupts and to schedule the control functions according to the selected multithreading and multicore configuration.
Two scenarios can be implemented, specifically:
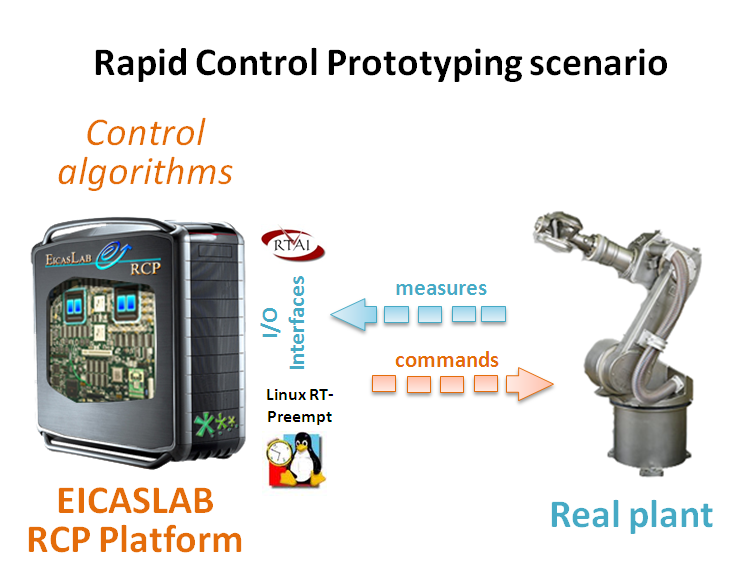
Standard RCP
It is the classical RCP scenario, in which you directly control the real plant.
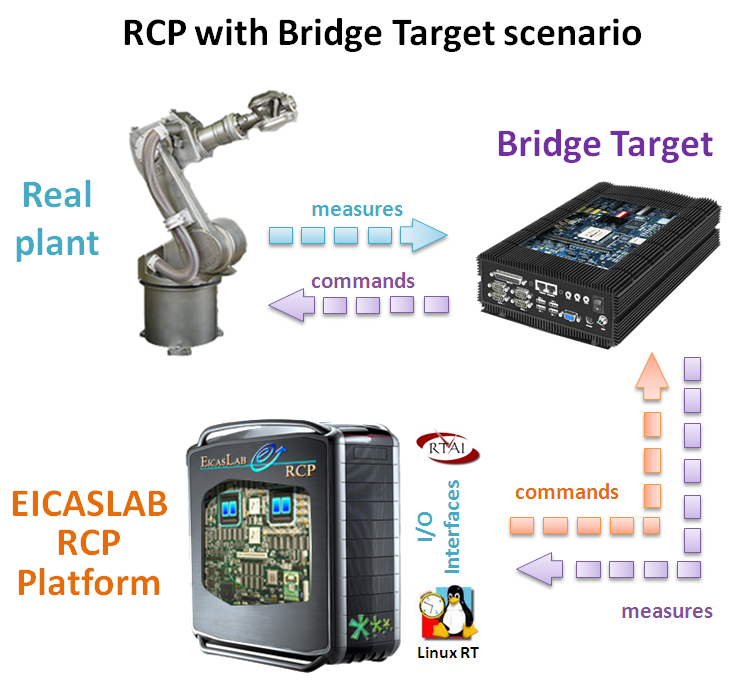
Extended RCP with Target Bridge
The connection with the real plant can be not easily implemented by using your PC. In this case, you can use your final target as a bridge to enable the connection of your PC with the real plant.
This scenario, called Extended RCP with Target Bridge requires both the RCP Module and the Target module.
EicasLab RAPID CONTROL PROTOTYPING PLATFORM
The EicasLab Rapid Control Prototyping Platform (briefly named EicasLab RCP Platform) is simply a standard commercial PC (which can be a laptop or a desktop PC) suitable configured with the following equipment:
- Linux-based real-time operating system (LinuxRT-preempt or Linux RTAI);
- suitable hardware interfaces for connecting the PC with external world (real plant or hardware targets);
- EicasLab suite with the RCP module and/or HIL/FVT module enabled. In order to generate source code for a hardware target a specific Target module must be enabled.
This way, a control designer can cover all the control design phases by using one suite and one standard commercial PC, without the annoyance of using different development environments and hardware boxes in order to perform the RCP process and with the advantage of saving cost and effort.
THE TURN KEY-SOLUTION IN JUST ONE SMART COMMERCIAL PC
EICAS – as an additional service to EicasLab users – offers a pre-packed Real-Time Rapid Control Prototyping Multi-core PC Platform with installed on-board a Linux RTOS, the EicasLab suite – equipped with the RCP module – and all the necessary interfaces to perform RCP activity.
